






優寶特機器人自公司成立以來,一直從事腿足式機器人的技術研究和產品開發。為了提升用戶體驗,加強產品的應用價值,為客戶帶來更多的機會和優勢,優寶特機器人針對四足機器人開源平臺,組織專家教授撰寫“YoboGo”產品的配套教材《四足仿生機器人基本原理及開發教程》。
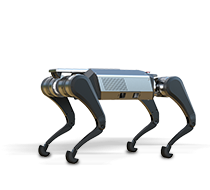
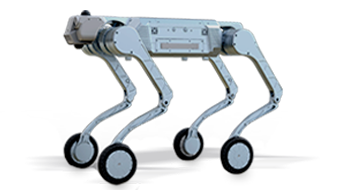
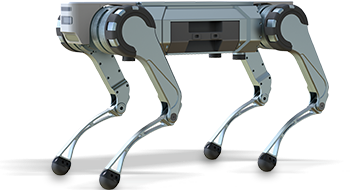
“YoboGo”是一款輕量型、高動態性能的四足機器人,配備優寶特在步態規劃、腿足控制、環境感知方面的先進技術,提供豐富的二次開發接口,是商用、教育、科研四足機器人領域的旗艦產品。
教材目錄
§第一章 緒論
§第二章 四足機器人運動學分析
§第三章 四足機器人雅克比矩陣與靜力學
§第四章 四足機器人動力學分析
§第五章 四足機器人步態規劃基礎理論
§第六章 四足機器人路徑規劃算法
§第七章 機器人的基本控制算法
§第八章 四足機器人穩定性判定方法
§第九章 四足機器人結構設計與安裝流程
§第十章 四足機器人硬件和電路結構介紹
§第十一章 基于模型預測控制的四足機器人全身運動控制方法
§第十二章 四足機器人運動控制程序框架介紹
§第十三章 四足機器人實驗仿真與驗證
四足機器人革新的關鍵
本教程由機器人領域的專業人士和技術專家撰寫,清華大學出版社出版。他們擁有豐富的實踐經驗,將幫助您深入理解四足機器人的核心原理和開發流程。通過本書的學習,您能夠系統地掌握四足機器人控制所需的各項關鍵技術。
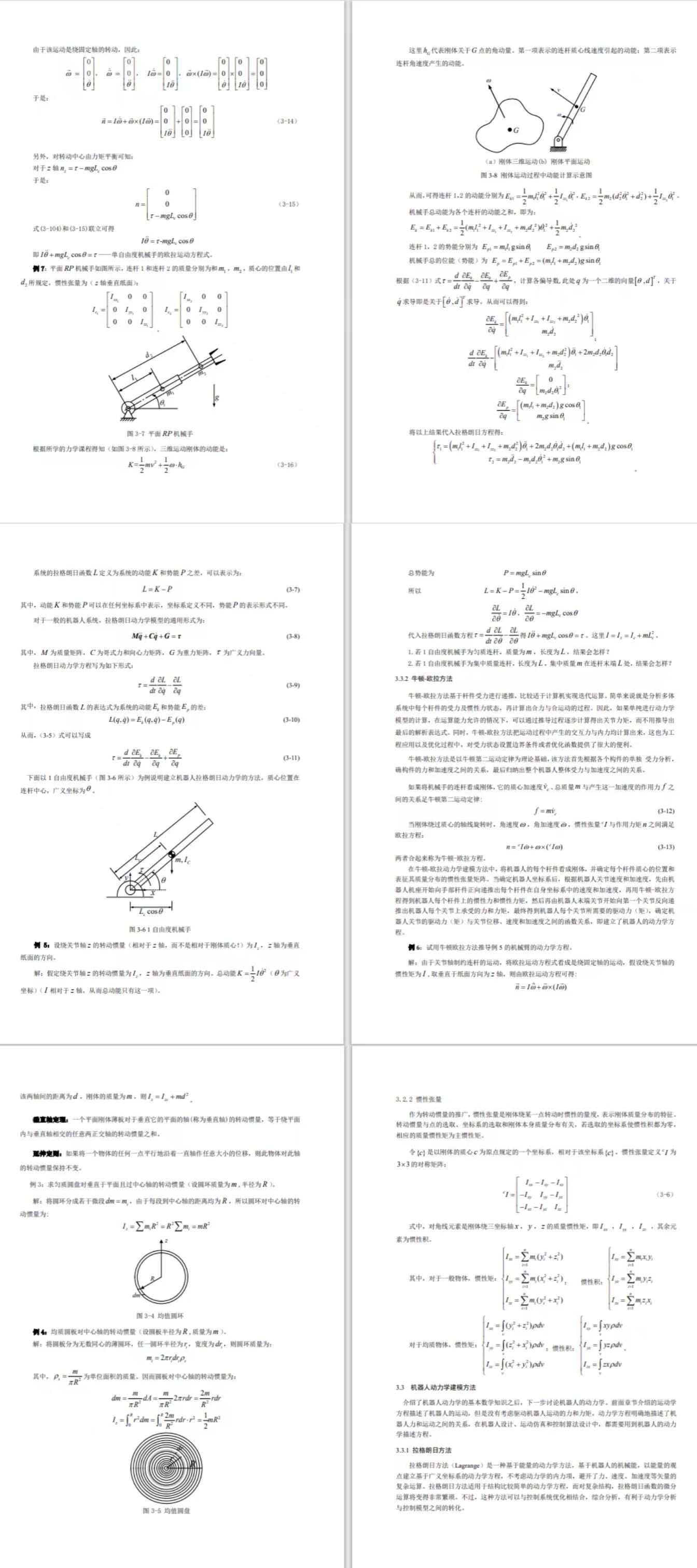
深入理解原理:本書將有助于您深入了解四足機器人的工作原理,包括齊次變換、運動學、靜力學、動力學、步態規劃和控制方面的內容。
助力實際開發:本書包括機器人軟硬件和電路結構的詳細介紹,運動控制算法的實際應用,以及高級控制算法在四足機器人設計中的運用,這些內容將逐步幫助您從基礎概念到實際開發,親手打造屬于自己的四足機器人模型。
創新應用示例:本書提供四足機器人的實驗仿真和驗證,幫助您深入了解四足機器人在不同領域的應用案例,從而激發您的創造性思維和創新靈感。
互動社區支持:與那些同您一樣熱衷于機器人技術的開發者和愛好者建立緊密的聯系,共享寶貴的經驗和資源,從彼此的見解中互相受益。
創新應用
1、步態實驗
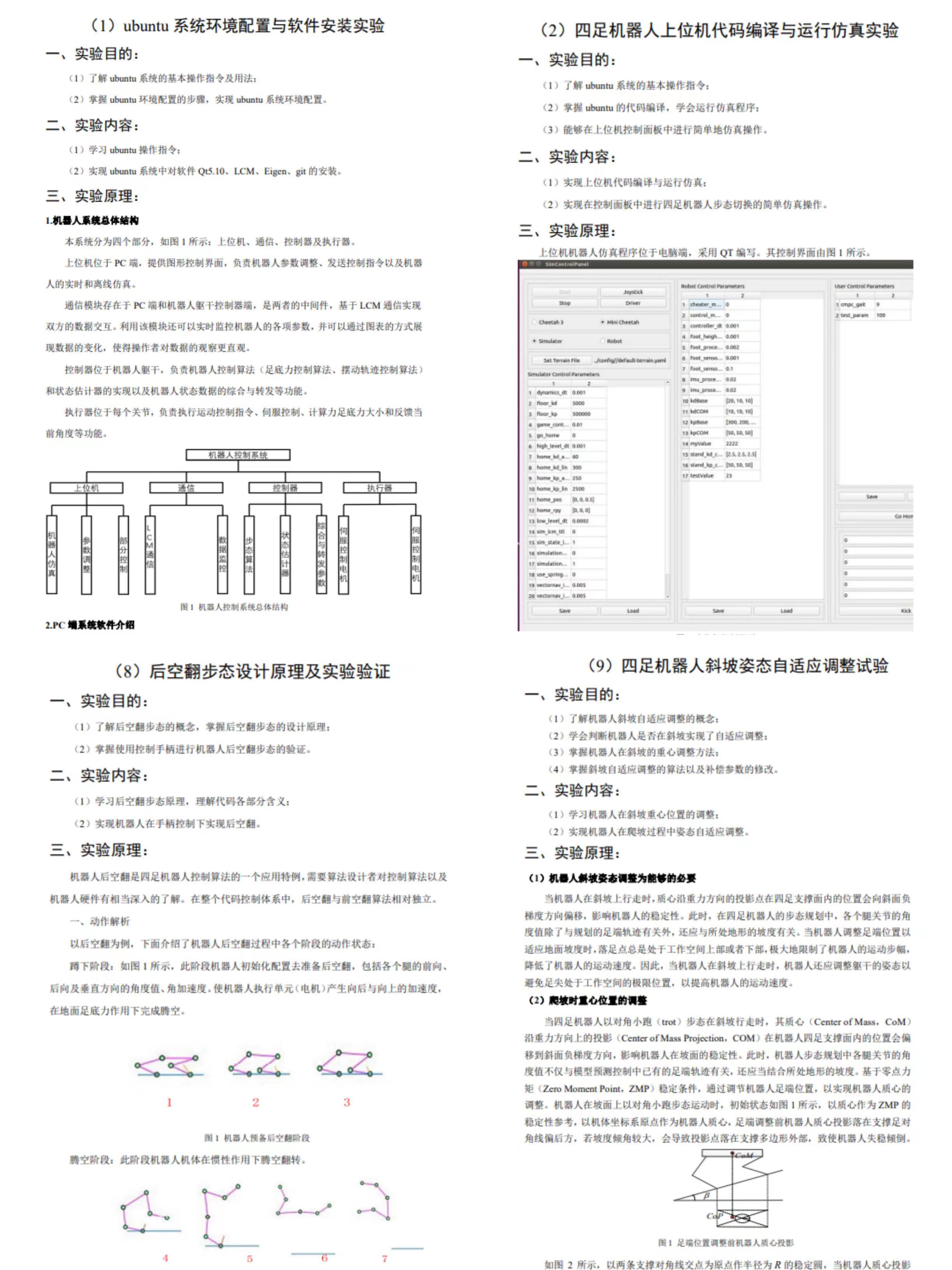
所謂步態,就是有關腿部擺動順序及其時間相序等的步行模式。對于四足機器人來說,其步態描述用步態周期、步態長度、占空比以及相對位移等參數來定義。本教程第13章結合仿真效果,從環境配置到軟件實驗,提供了Trot、walk、pace和后空翻等多種步態的實驗驗證及斜坡自適應調整實驗的具體步驟。通過實驗驗證將課本理論知識轉化為實踐經驗,有助于加深對概念和原理的理解,使學習更具深度。
2、賽事支持
為推動機器人領域的創新發展,促進智能機器人技術創新應用,通過中國機器人大賽、智能技術應用場地賽、創新技術路演賽等多種方式,為從事人工智能與機器人領域研究的高校院所、企事業單位和中小學等教育機構,提供一個全新的學習、展示、交流和競技的平臺。

賽事現場

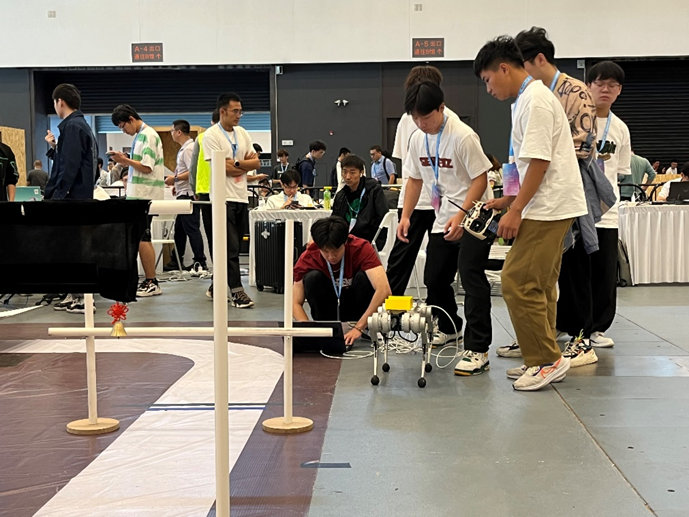

優寶特機器人為各類賽事提供定制版四足機器人等賽具,同時提供專業的技術培訓、和全方位的技術支持服務,助力參賽者在競技中取得優異成績。《四足仿生機器人基本控制原理及開發教程》的發布,進一步凸顯了優寶特機器人在四足機器人教育端的領先地位。2023年優寶特機器人將繼續支持四足機器人教育事業,為其做出更有意義的貢獻!
在我們不斷演進和改進的過程中,我們致力于提供卓越的產品和知識支持,以確保每位用戶都能充分體驗到我產品的優勢,這是我們對用戶的承諾,也是我們不懈努力的動力源泉。如果您想了解更多有關我們的產品的以及最新教材的信息,歡迎隨時與我們取得聯系。
?? 郵箱:service@yobotics.cn
?電話:0531-88803716
??地址:山東省濟南市高新區新濼大街1768號齊魯軟件園大廈B座B區-5F

山東優寶特智能機器人有限公司是山東省政府引進的高科技企業。公司核心團隊具有山東大學、中國科學院自動化所等知名院校背景,長期進行人工智能、特種機器人研究與開發。公司入選山東省“泰山產業領軍人才計劃"。獲“國家級高新技術企業”、“山東省專精特新中小企業”、山東省創新型中小企業“濟南市瞪羚企業”等榮譽。公司開發的腿足式機器人、液壓特種機器人應用于電力巡檢、應急救援、礦山、高校等行業客戶。